Examples¶
The below examples is given in the paper Neural network approach to continuous-time direct adaptive optimal control for partially unknown nonlinear systems, the full source code is provided in here
Check out the other examples at https://github.com/VNOpenAI/OpenControl/tree/master/examples
Note
In this python implementation, we dont use the algorithm in the paper because the original one requires knowledge the system dynamics. Instead, we simulate with OpenControl, Off Policy ADP Controller. The results that is the same as the paper’s results demonstrate our python packages.
Problem statements & Implementation¶
Consider the nonlinear system described be the equations:

Define the system by code
# define system
def dot_x(t,x,u):
# dynamic of the system
x1 = x[0]
x2 = x[1]
# coefficient
# system dynamics
dx1 = -x1 + x2
dx2 = -0.5*(x1+x2)+0.5*x2*np.sin(x1)**2 + np.sin(x1)*u
dx = [dx1, dx2]
return dx
dimension = (2,1)
sys = NonLin(dot_x, dimension)
# setup simulation
t_start = 0; t_stop = 20
x0 = np.array([-1, 1])
sample_time = 0.01
sys.setSimulationParam(t_sim=(t_start, t_stop), sample_time=sample_time, x0=x0)
The cost function  is approximated by the neural network which has basis function is
is approximated by the neural network which has basis function is ![\phi(x) = [x_1^2 + x_1x_2 + x_2^2]^T](_images/math/8dbb3496d0c0cc416ee33141f26baceaacc2c40a.svg) . The initial stabilizing controller was taken as
. The initial stabilizing controller was taken as  applied for 30 time intervals
applied for 30 time intervals  .
.
Design controller in code:
# define and setup controller
ctrl = NonLinController(sys)
u0 = lambda x: -1.5*np.sin(x[0])*(x[0] + x[1])
data_eval = 0.1; num_data = 30
explore_noise = lambda t: 0.2*np.sum(np.sin(np.array([1, 3, 7, 11, 13, 15])*t))
phi_func = lambda x: np.array([x[0]**2, x[0]*x[1], x[1]**2])
ctrl.setPolicyParam(data_eval=data_eval, num_data=num_data, explore_noise=explore_noise, u0=u0, phi_func=phi_func)
Then run the simulation:
# run simuilation
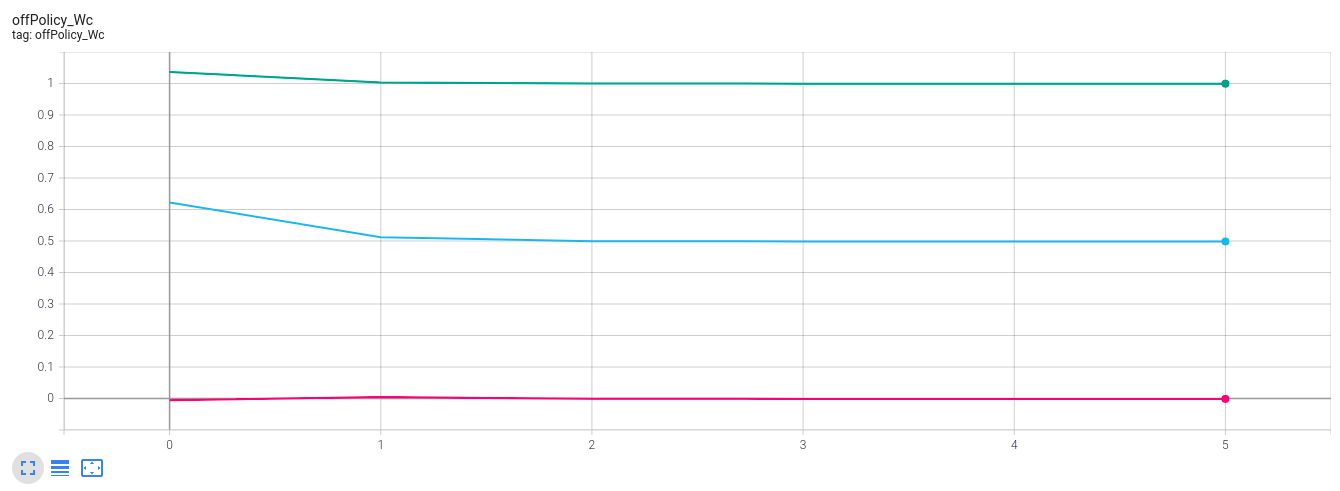
Wc, Wa = ctrl.offPolicy()
print("The optimal weight of the critic")
print(Wc)
# for visualizing the results, using tensorboard
Analysis simulation with Tensorboard
For quick run, see the notebook file